鳳龍弐号の電源システム、太陽電池について説明しています。
電源系では、衛星に搭載している太陽電池を電力発生源として、各サブシステムへ安定して電力を供給することを目的としています。電源系が開発にあたり考えなければならない事項は主に以下の項目です。
バッテリと太陽電池の紹介をしたいと思います。
本衛星が地球の影にいる蝕時には、バッテリを使用して、必要な電力を確保することになります。
鳳龍弐号では民生品のニッケル水素電池二次電池“エネループ”を使用しています。

図1,利用している電池 |
使用した理由は以下の通りです
|
この電池を三直列三並列にして製作したバッテリを図2に、仕様を表1に示します。
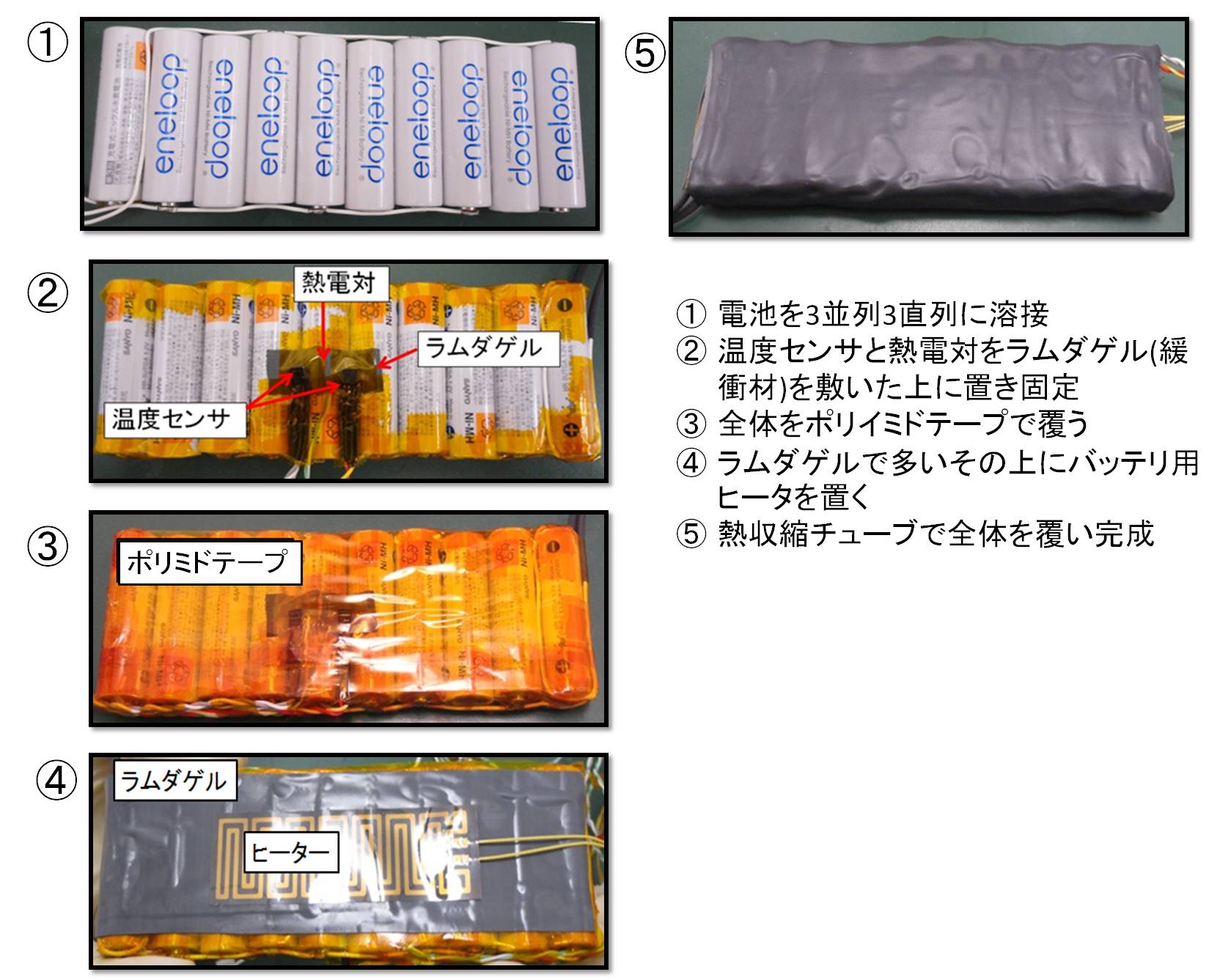
図2,エネループを仕様して作成したバッテリ
| 表1、バッテリ仕様 | |
| 電池電圧 | 3.6V |
| バッテリ容量 | 5700mAh |
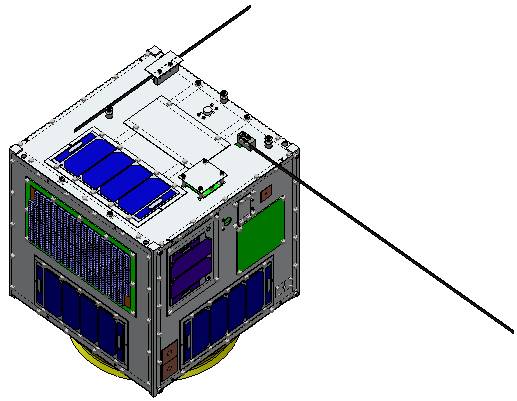
鳳龍弐号には三種類の太陽電池が搭載されており、
があります。
太陽電池では日照時に受けた太陽光エネルギーを電力に変換し、各サブシステムへ電力供給し、蝕時に備えてニッケル水素電池を充電します。
図3に鳳龍の電源システム図を示します。

図3, 電源システム
鳳龍弐号は運用機関終了後に電源を遮断し完全に停止することが設計要求として挙げられていました。
そこで電源系では図3中の太陽電池とバッテリ間にKill Switchを挿入し、太陽電池からでの電力が衛星内に送られないようにしました。
その詳しい仕組みを図4に示します。

図4, 電源システム
Kill Switchは地上からのアップリンクコメントで始動します。
誤って動作しないように2冗長で設計されています。
日照時にはバッテリを充電、日蝕時にはバッテリを放電します。
この動作が効率よく、動作するための充放電回路の仕組みを図5,6を用いて説明します。

図5, 太陽電池のI-V特性

図6, 発電モードとバッテリ残量
太陽電池からもっとも効率よく電力が取り出せるのが図5中のpower pointという点です。
しかしいつもこの条件で発電できるわけではない為、CVモードとPPTモードという制御を行うことによりなるべくこのpower pointで発電できるようにしようとしたのが、この充電放電回路の目的です。
PPTモード:バッテリ残量が少ない時に動作するモードで、最大の発電電力で太陽電池を発電させます。
CVモード:発電量を調節するモードであり、バッテリ残量が一定以上の時、発電電力を低下させることで充電量を減らします。
バッテリの残量が減ってくるとバッテリ電圧が下がり太陽電池からの電流が多くなります。図5で言うと発電点(赤点)が左にずれてきます。
図6でいうと、赤線が上昇する状態です。よって充放電回路はPPTモードの比率が大きくなり発電点を最高率の点へ戻そうとします。
逆に十分にバッテリが充電されている時には電流がバッテリに流れにくくなるので、図5でいうと発電点は下にさがってきます。
そこで今度はCVモードの比率を上げて発電点を元に戻すような制御を行うのです。
また、鳳龍は沿磁力線制御という受動制御方式を採用しており発生電力は周期的に変化します。