鳳龍弐号が採用している姿勢制御について説明しています。
姿勢制御班は大きく2つ、姿勢検出と姿勢制御に分けることができます。
姿勢検出は、さまざまなセンサデータより自分の向いている方向、回転の速度などを検出することです。
姿勢制御は、姿勢検出より求められた情報から、必要な向きに衛星の向きを変えたり安定させたりすることです。
沿磁力線制御
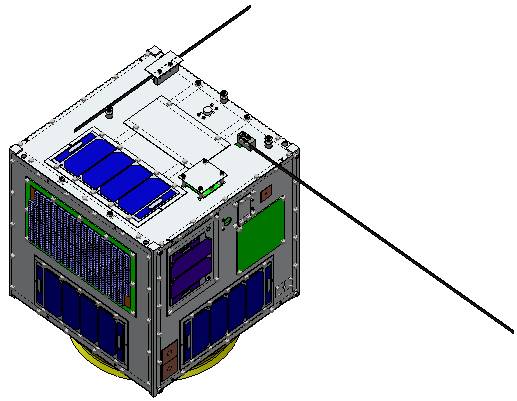
鳳龍には永久磁石を搭載する。地磁気の磁力線に沿うように永久磁石が動くことを利用した受動的な姿勢制御方式である。
永久磁石による沿磁力線制御を行った際、ライブレーション(秤動)運動が発生する。
この運動を減衰させ姿勢を安定化するために、ヒステリシスダンパーを搭載する。
ダンパーに作用する磁場が変動する際に発生するヒステリシス損と渦電流損により、ライブレーション運動のエネルギーが減衰し安定化する。
各太陽電池パネルの発生電力の差からシャッターチャンスを判断する。
地球上の任意の場所を搭載カメラで撮影するためのシステムを現在開発中
≪永久磁石≫
材質:アルニコ5
寸法:φ4mm*25mm
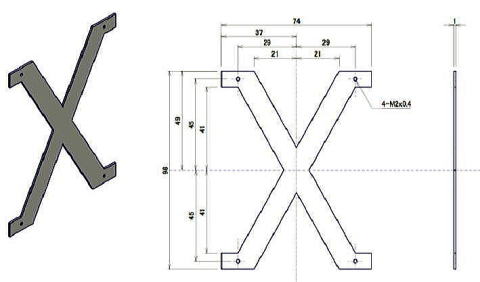
≪ヒステリシスダンパー≫
材質:PCパーマロイ
寸法:98mm*74mm*1mm